|
I am currently a Machine Learing Engineer at Apple. My research focuses on robot navigation and state estimation. I defended my Ph.D. in Robot Perception and Navigation Group at University of Delaware in Oct. 2021, advised by Prof. Guoquan (Paul) Huang. I received Master of Science degree in Mathematics from University of Delaware in 2020, Master of Engineering degree in Mechanical Engineering from Xi'an Jiaotong University in 2012, and Bachelor of Engineering degree in Mechanical Engineering from Shandong University in 2009. I was a recipient of the University Doctoral Fellowship Award (2019-2020) at University of Delaware. I have also completed internship programs at Facebook Reality Lab and Bosch Research Institute, respectively. Email / CV / Google Scholar / Research Gate / GitHub / Twitter / Homepage@Udel |

|
|
My research interests are within the areas of robot navigation, simultaneous localization and mapping (SLAM), computer vision, optimization, and multi-sensor fusion, with a concentration on enabling robots to perceive the world through fusing multi-modality information from different sensors (visual cameras, IMUs, sonar, wheel encoder, 2D/3D LiDAR, GPS and so forth). |
|
Please find below a complete list of my publications with representative papers highlighted. |
|
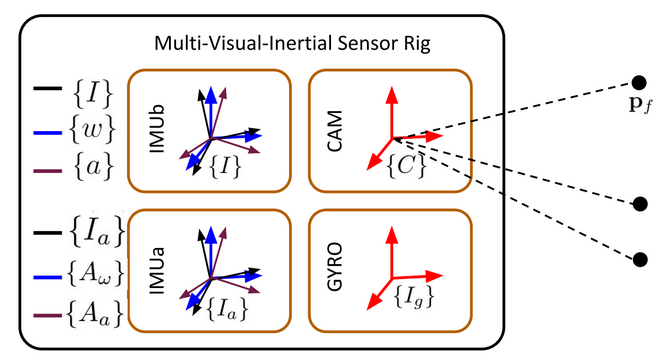
Yulin Yang, Patrick Geneva, Guoquan(Paul) Huang International Journal Of Robotics Research, 2024 bibtex / openmvis.com Technical Report: Multi-Visual-Inertial System: Analysis,Calibration and Estimation
Multi-visual-inertial system with full-parameter calibration
|

|
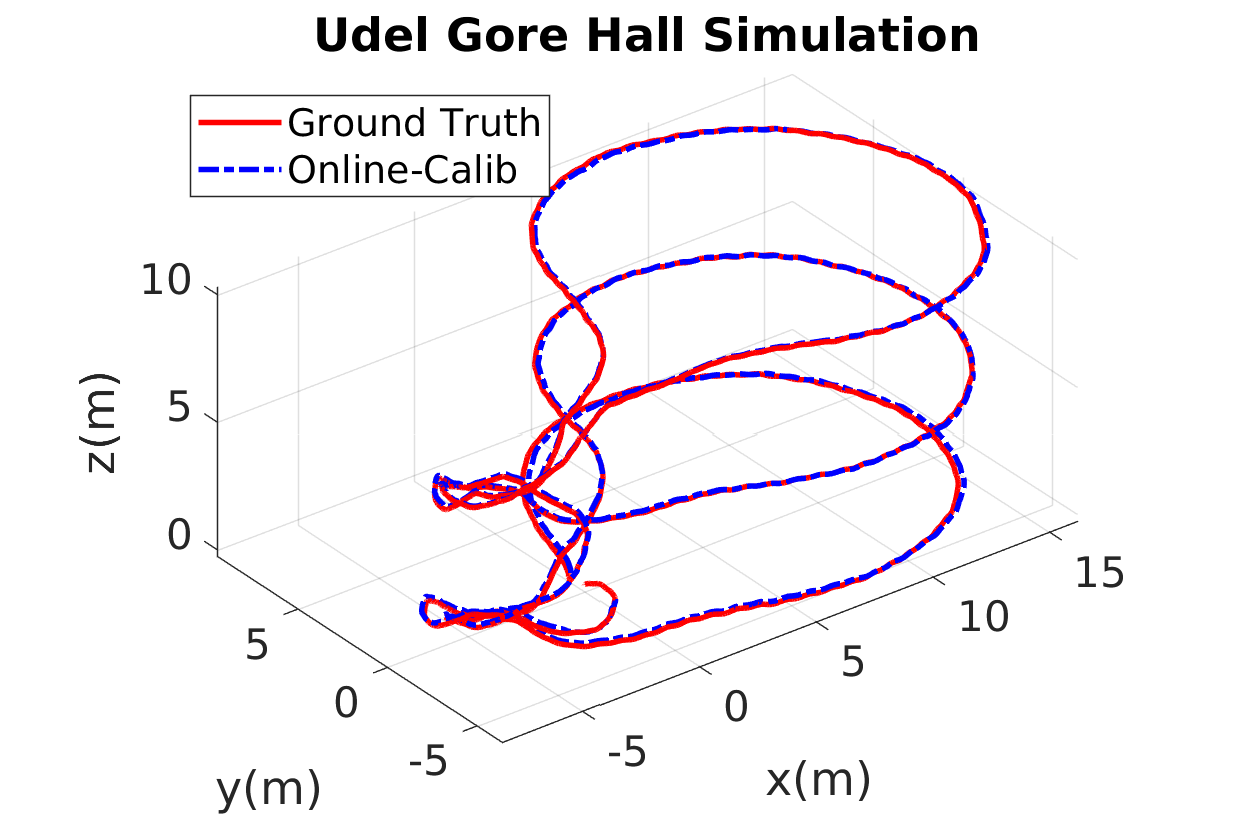
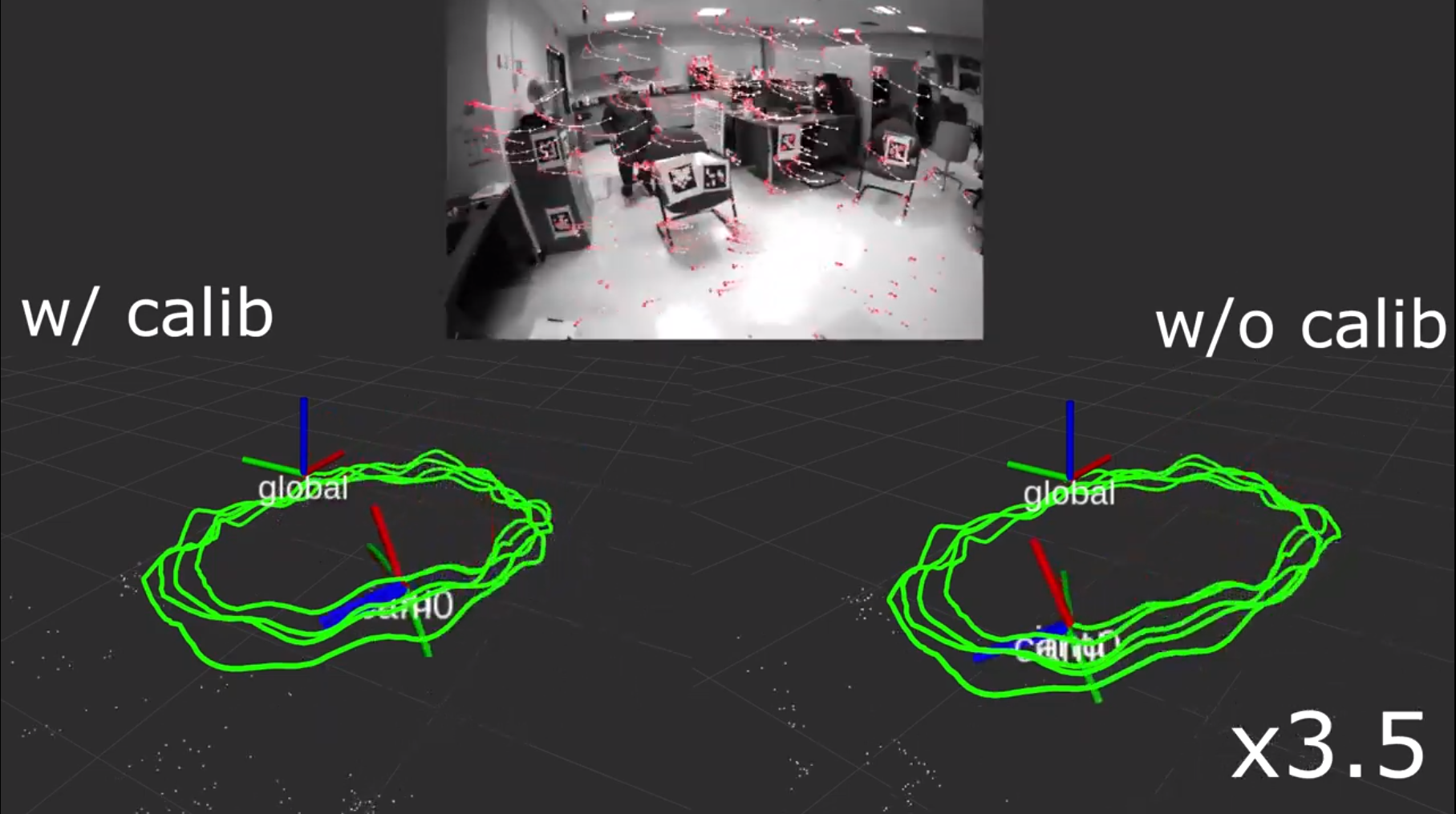
Yulin Yang, Patrick Geneva, Xingxing Zuo, Guoquan(Paul) Huang IEEE Transactions On Robotics, 2023 bibtex / video Technical Report: Online Self-Calibration for Visual-Inertial Navigation Systems: Models, Analysis and Degeneracy
Monocular VINS with full-parameter online self-calibration
|

|
Kleio Baxevani, Indrajeet Yadav, Yulin Yang*, Michael Sebok, Herbert G. Tanner, Guoquan(Paul) Huang Guidance, Navigation and Control, 2023 bibtex Autonomous path planning and sensor calibration for unmanned ground vehicle. |
|
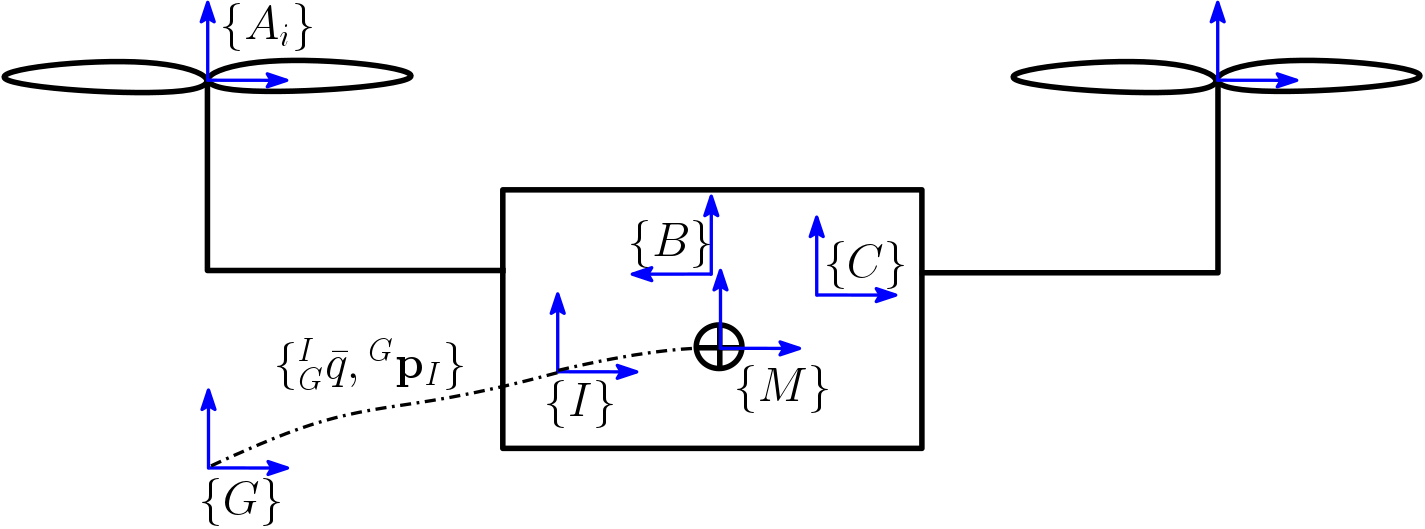
Chuchu Chen*, Yulin Yang*, Patrick Geneva, Woosik Lee, Guoquan(Paul) Huang International Conference on Intelligent Robots and Systems (IROS), 2022 bibtex Supplementary Materials: Visual-Inertial-Aided Online MAV System Identification Tightly coupled MAV dynamic system with VINS. |
|
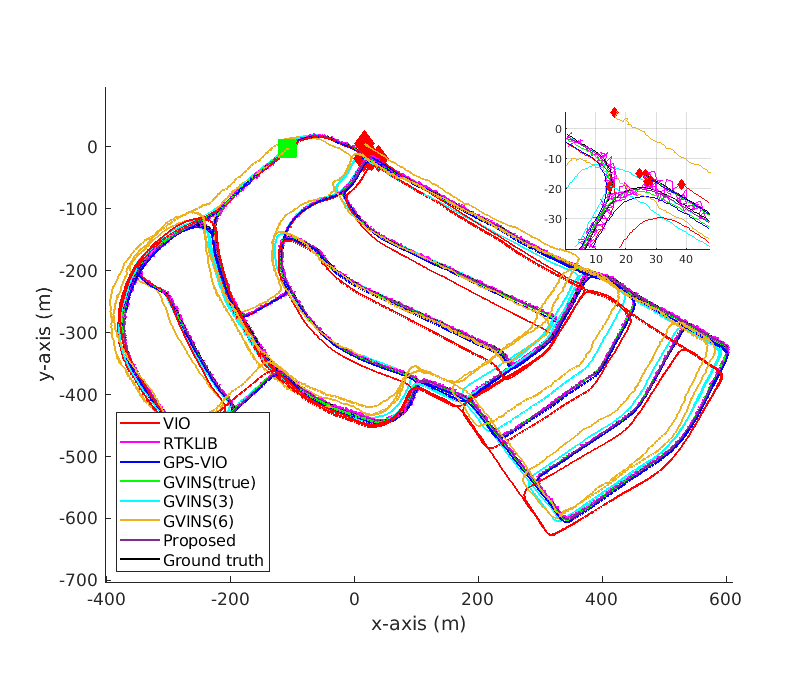
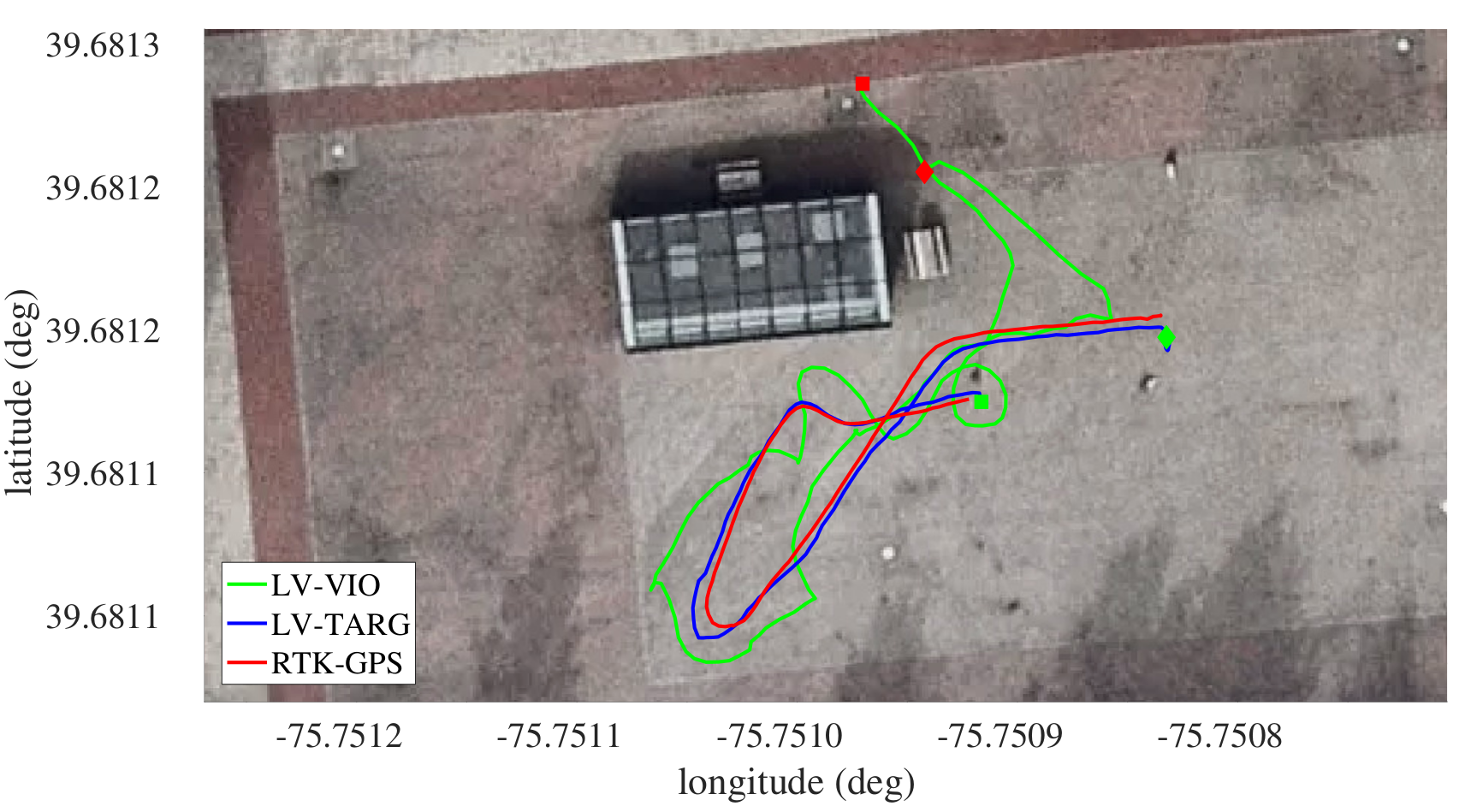
Woosik Lee, Yulin Yang, Patrick Geneva, Guoquan(Paul) Huang IEEE International Conference on Robotics and Automation (ICRA), 2022 bibtex VINS tightly coupled with GNSS measurements. |
|
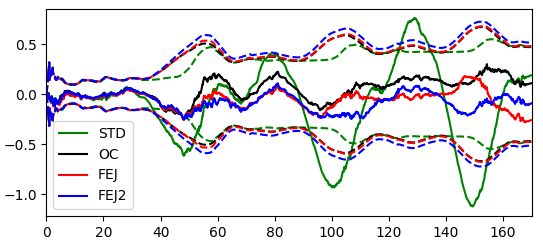
Chuchu Chen, Yulin Yang, Patrick Geneva, Guoquan(Paul) Huang IEEE International Conference on Robotics and Automation (ICRA), 2022 bibtex Technical Report: FEJ2: A Consistent Visual-Inertial State Estimator Design Improve FEJ to compensate the lieanrization errors. |
|
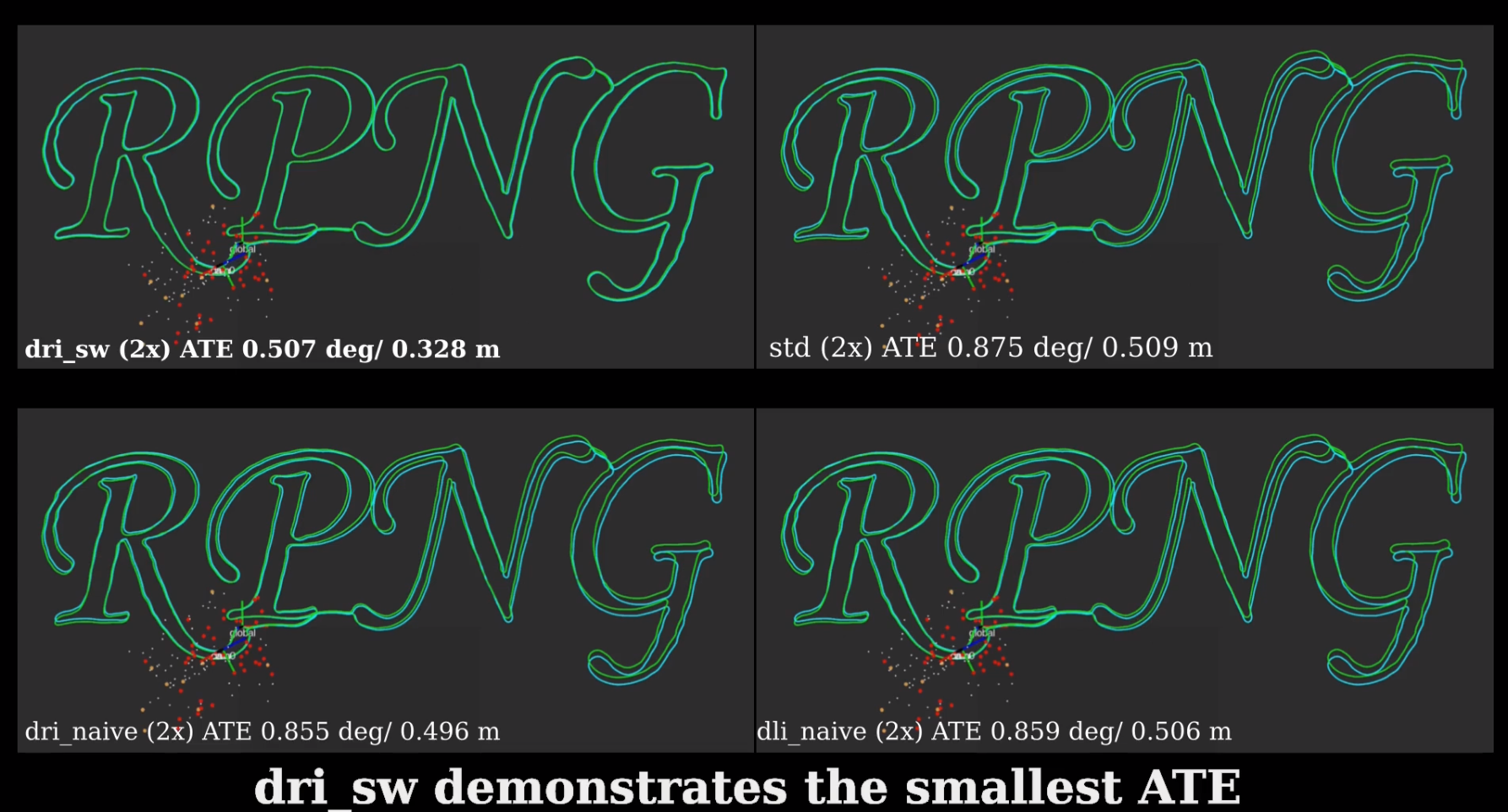
Yulin Yang, Chuchu Chen, Woosik Lee, Guoquan(Paul) Huang IEEE Robotics and Automation Letters (RAL), 2022 bibtex / video / Supplementary Materials Supplementary Materials: Decoupled Right Invariant Error States for Consistent Visual-Inertial Navigation
Observability analysis and computation analysis for RI-VINS
|
|
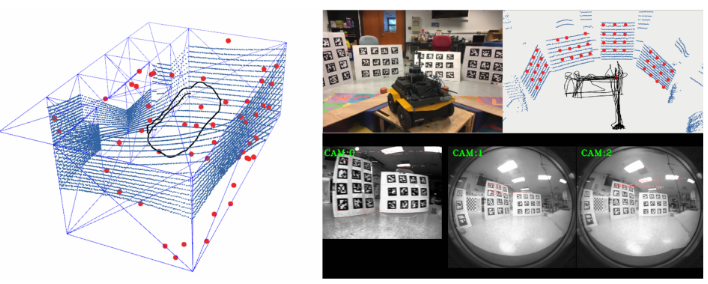
Yulin Yang, Woosik Lee, Philip Osteen, Patrick Geneva, Xingxing Zuo, Guoquan(Paul) Huang VINS Workshop@ICRA, 2021 bibtex / video / slides
Inertial aided multi-sensor calibration with spatial-temporal and intrinsic calibration.
|
|
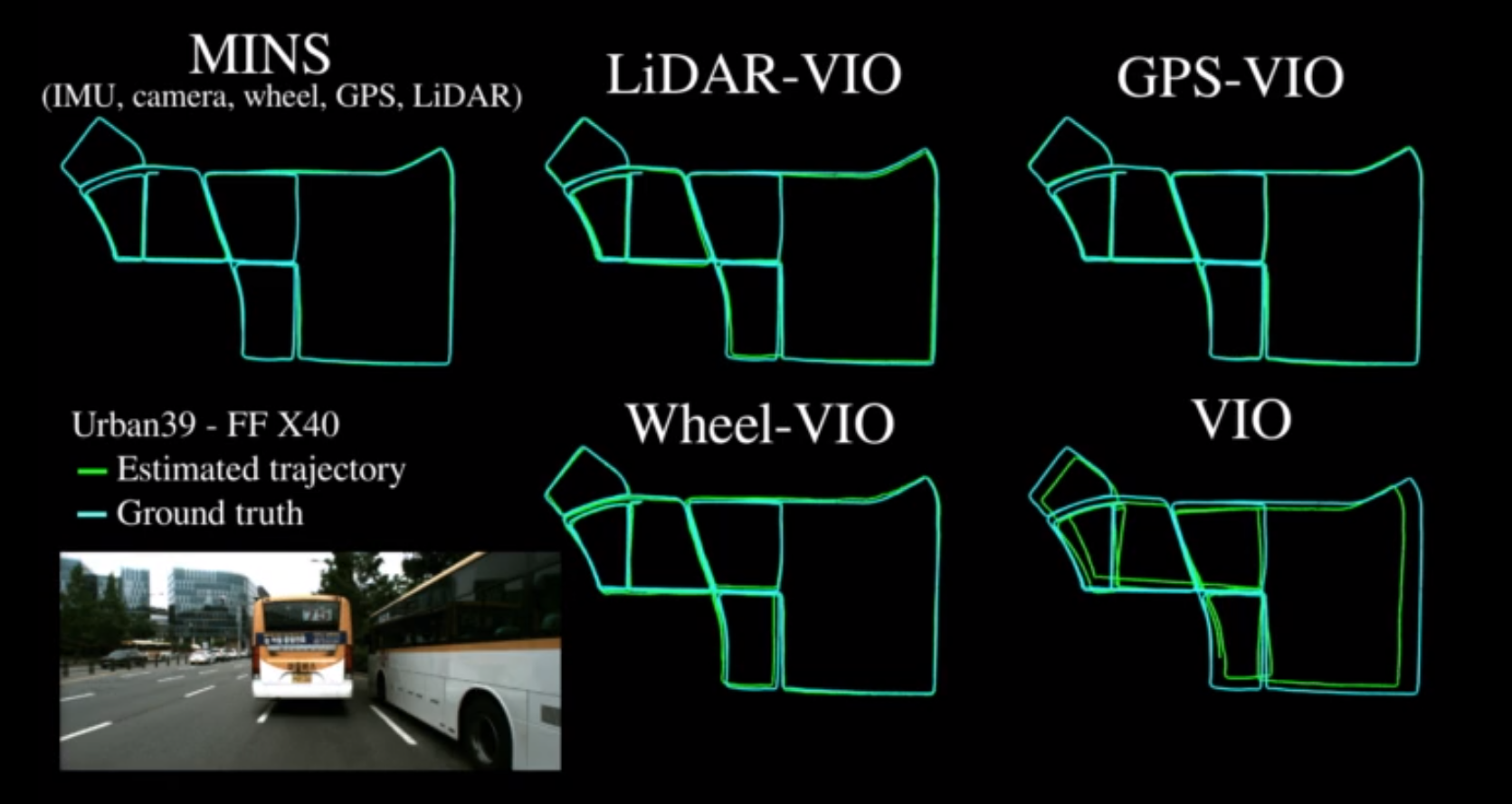
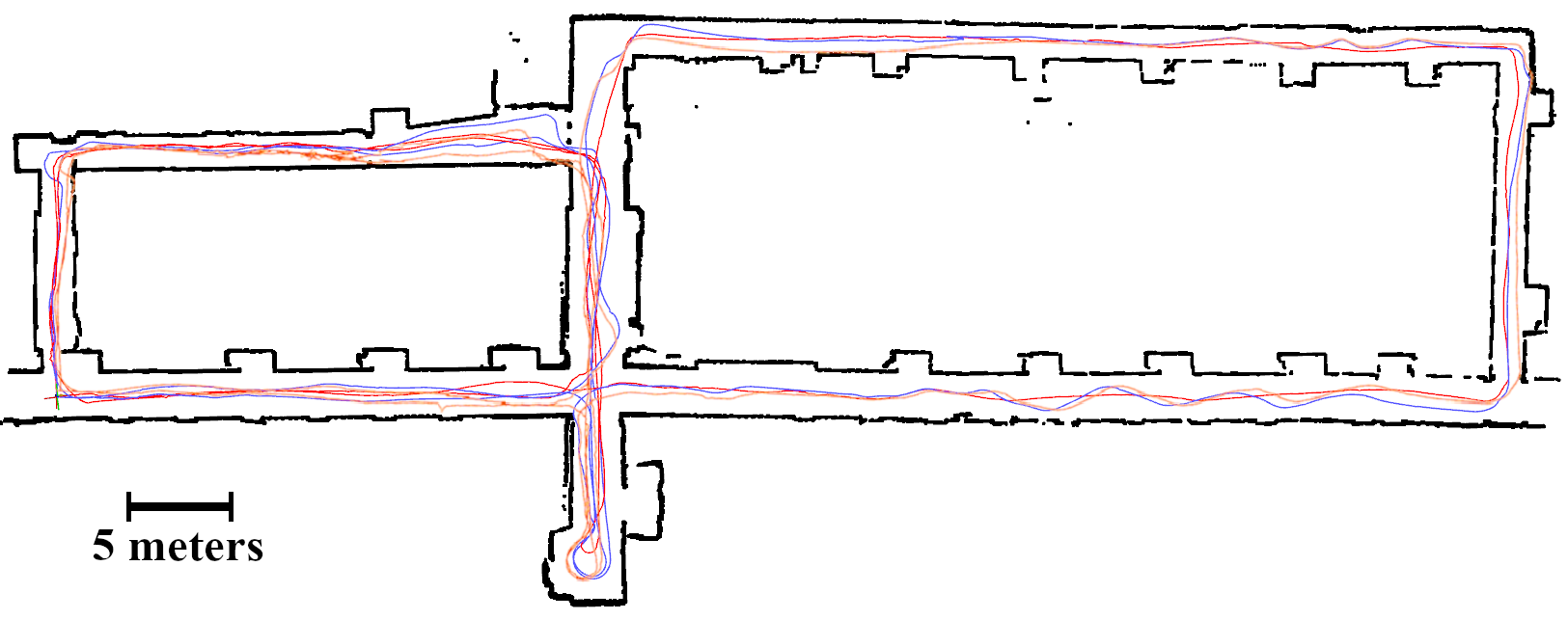
Woosik Lee, Yulin Yang, Guoquan(Paul) Huang IEEE International Conference on Robotics and Automation (ICRA), 2021 bibtex / video
MINS: a tightly-coupled IMU/CAM/LiDAR/Wheel/GPS navigation system
|
|
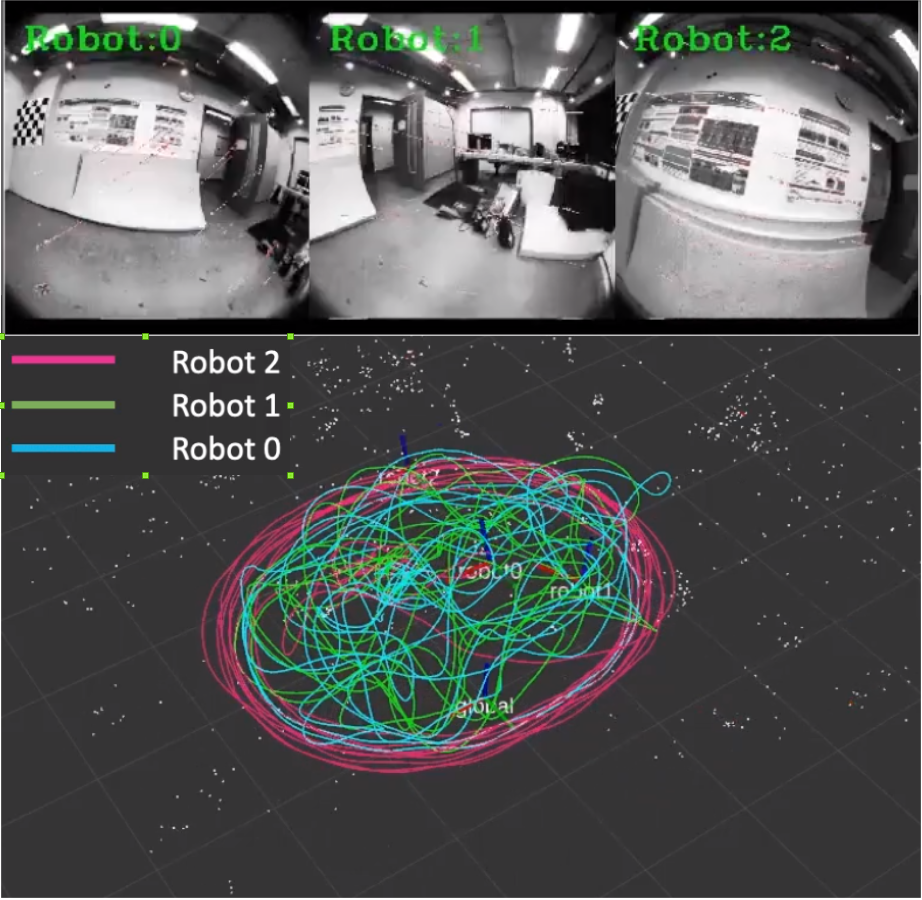
Pengxiang Zhu, Yulin Yang, Wei Ren, Guoquan(Paul) Huang IEEE International Conference on Robotics and Automation (ICRA), 2021 bibtex / video
Fully distributed cooperative (DISC)-VIO based on covariance intersection.
|
|
Xingxing Zuo, Yulin Yang, Patrick Geneva, Jiajun Lv, Yong Liu, Guoquan(Paul) Huang International Conference on Intelligent Robots and Systems (IROS), 2020 bibtex / video
Sliding window based Lidar plane tracking.
|
|
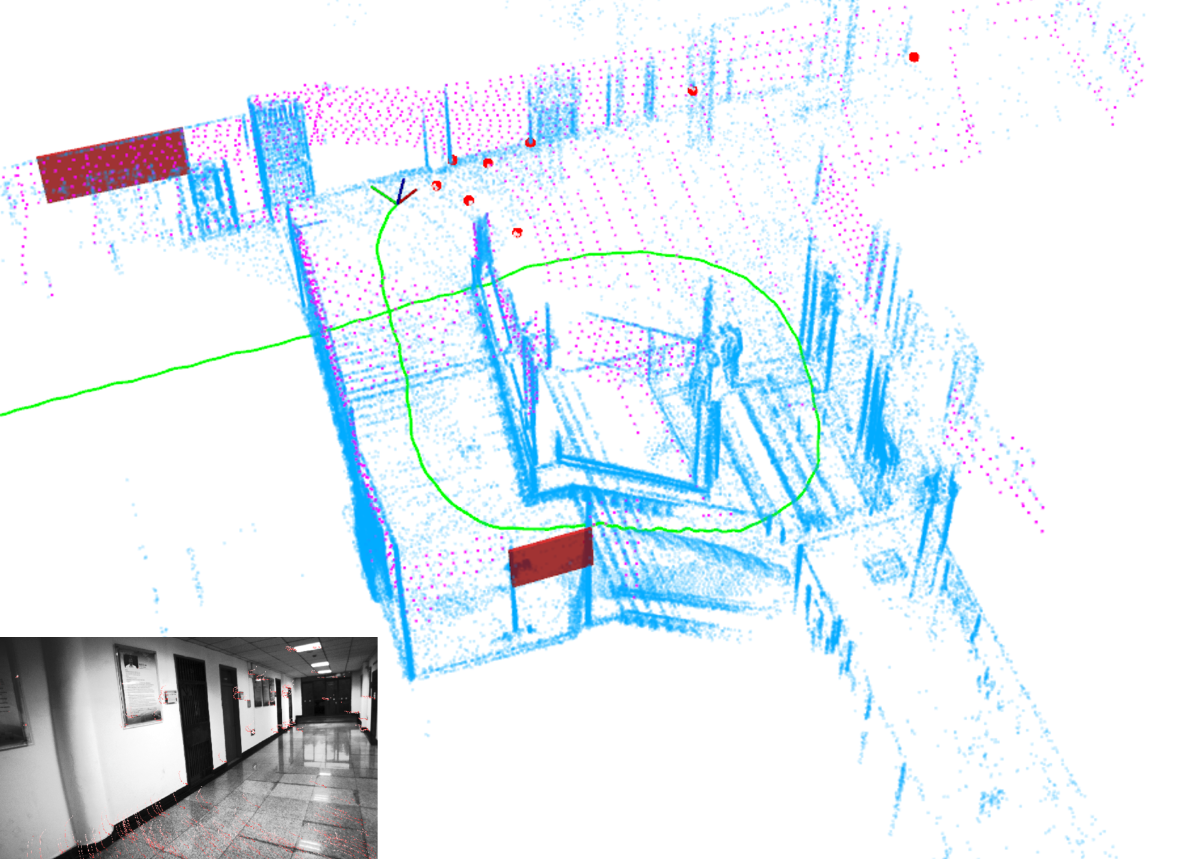
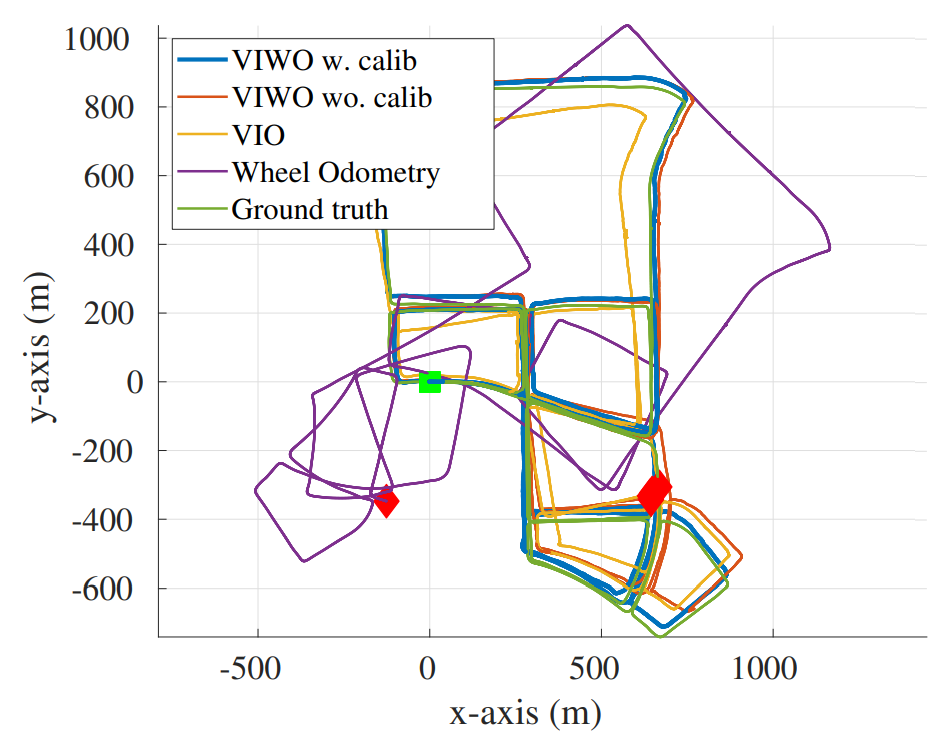
Woosik Lee, Kevin Eckenhoff, Yulin Yang, Patrick Geneva, Guoquan(Paul) Huang International Conference on Intelligent Robots and Systems (IROS), 2020 bibtex / video
Tightly-coupled Visual-inertial-wheel odometry.
|
|
Patrick Geneva, Nate Merrill, Yulin Yang, Chuchu Chen, Woosik Lee, Guoquan(Paul) Huang International Conference on Intelligent Robots and Systems (IROS), 2020 bibtex / video
Exploit 2D line for improved loop detection for occupancy grid mapping.
|
|
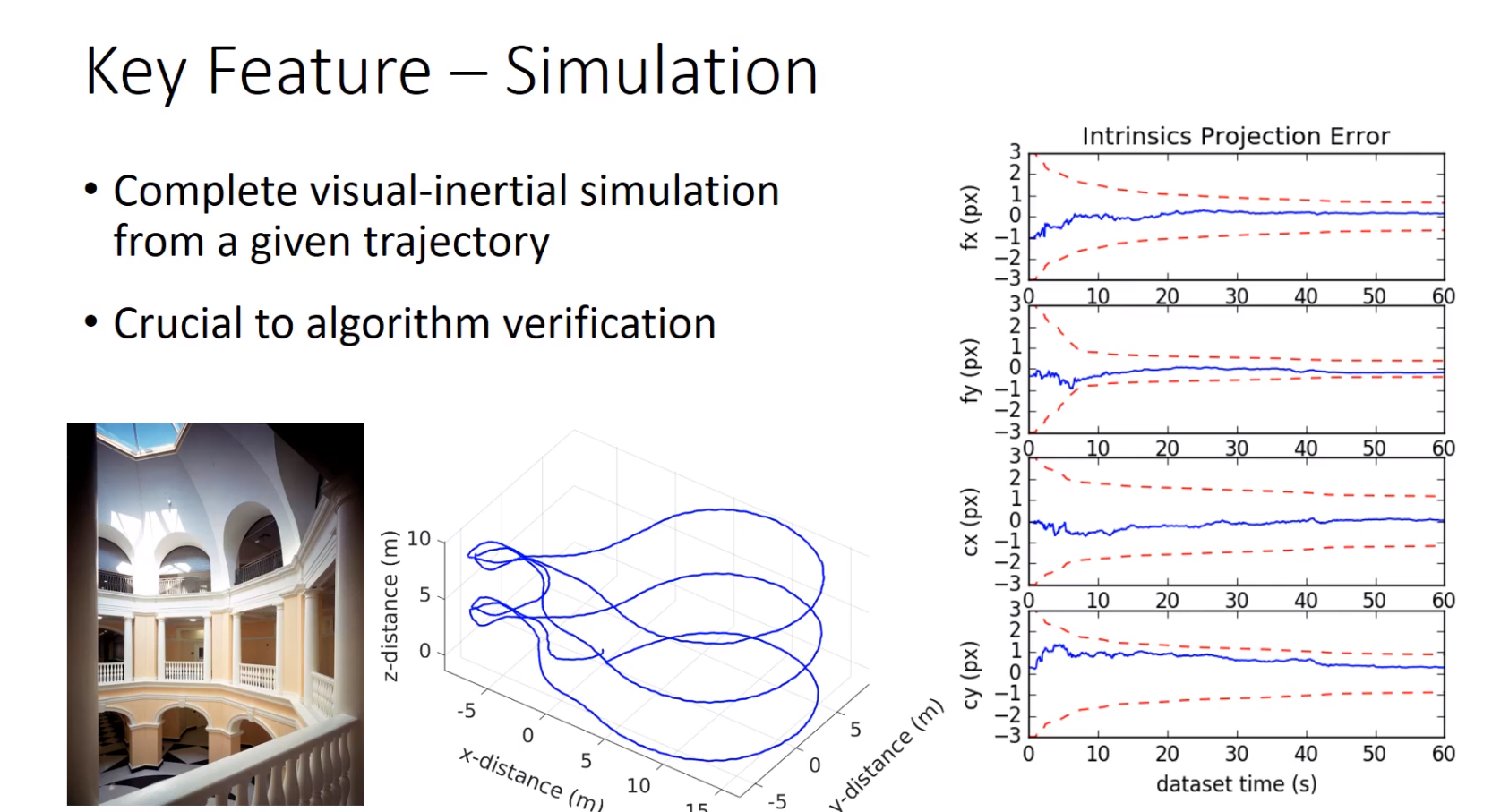
Yulin Yang, Patrick Geneva, Xingxing Zuo, Guoquan(Paul) Huang Robotics: Science and Systems (RSS), 2020 bibtex / video / video / video Supplementary Materials: Online IMU Intrinsic Calibration: Is It Necessary?
Mono-VINS with online IMU intrinsic calibration.
|
|
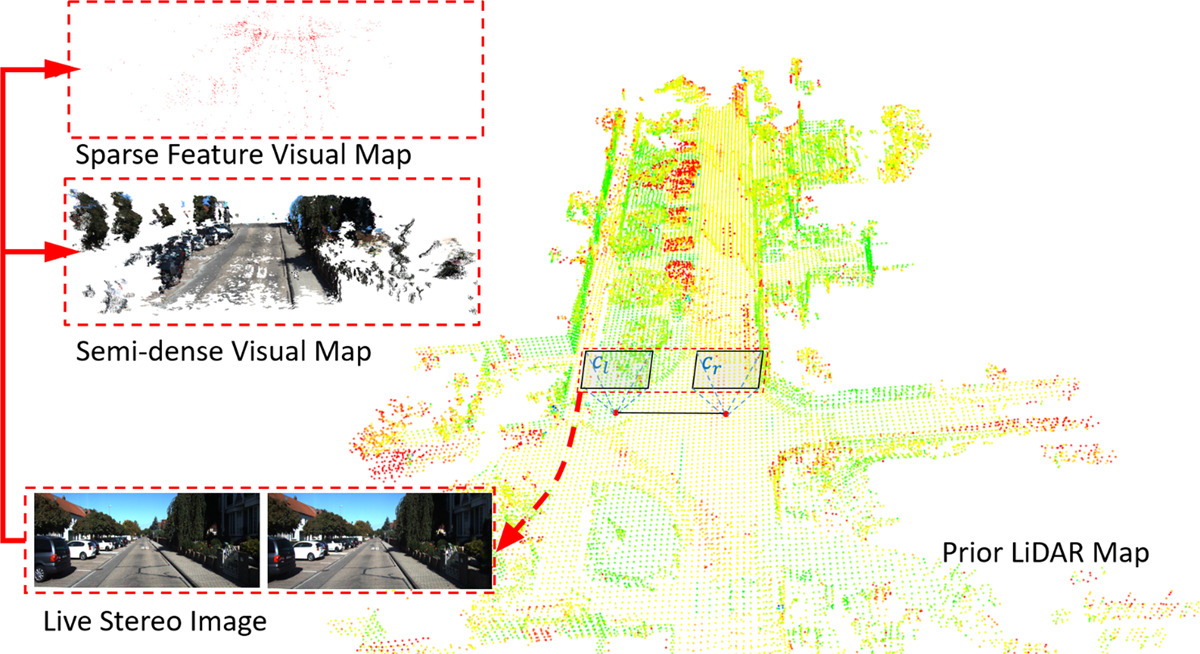
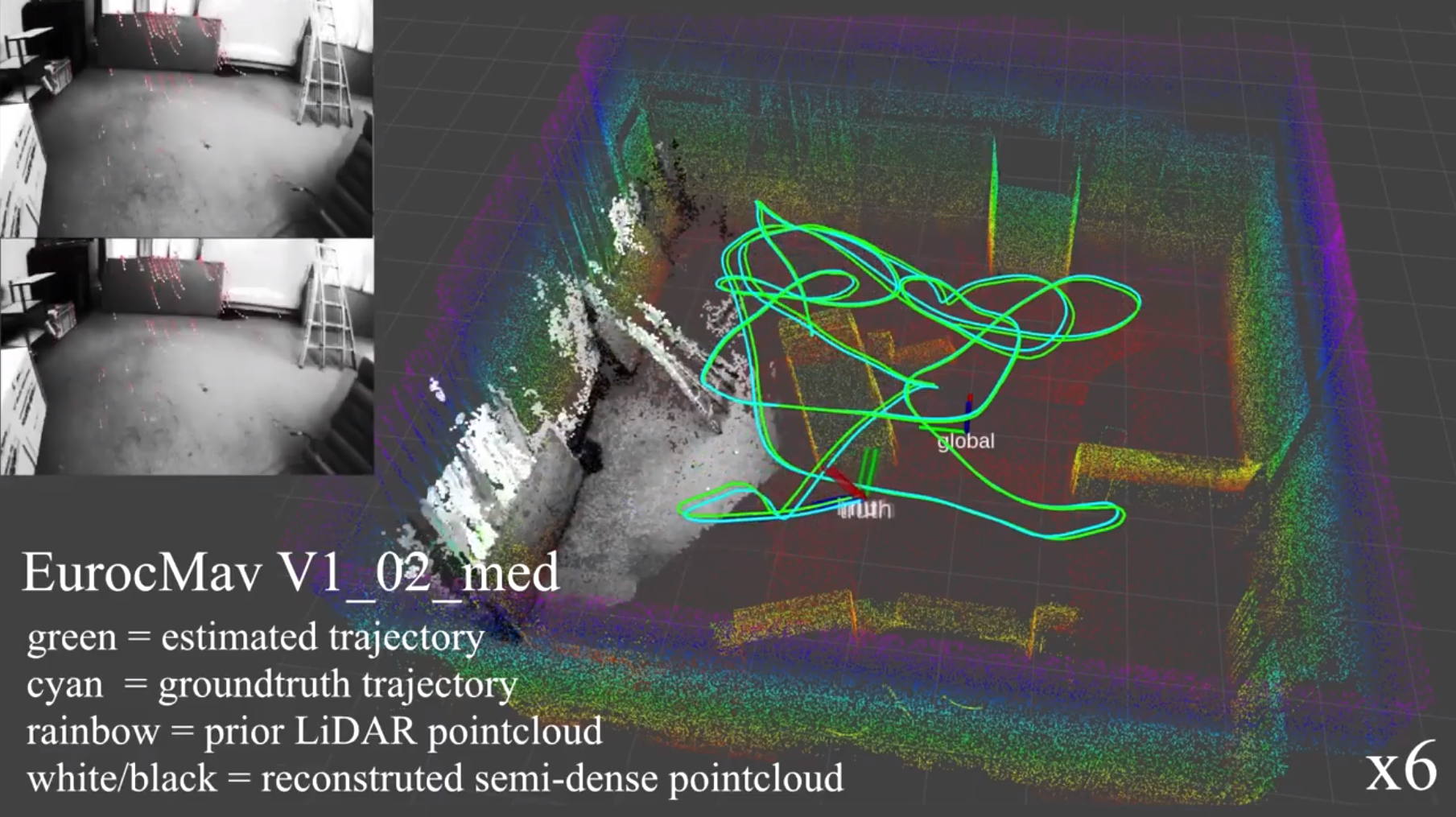
Xingxing Zuo, Wenlong Ye, Yulin Yang, Renjie Zheng, Teresa Vidal‐Calleja, Guoquan(Paul) Huang, Yong Liu, Journal of Field Robotics (JFR), 2020 bibtex
Efficient visual odometry by leveraging prior LiDRA map.
|
|
Yulin Yang, Benzun Pious Wisely Babu, Chuchu Chen, Guoquan(Paul) Huang, Liu Ren IEEE International Conference on Robotics and Automation (ICRA), 2020 bibtex / video / tech report Supplementary Materials: Analytic Combined IMU Integration (ACI^2) For Visual Inertial Navigation
Modularized and analytic derived IMU integration algorithm.
|
|
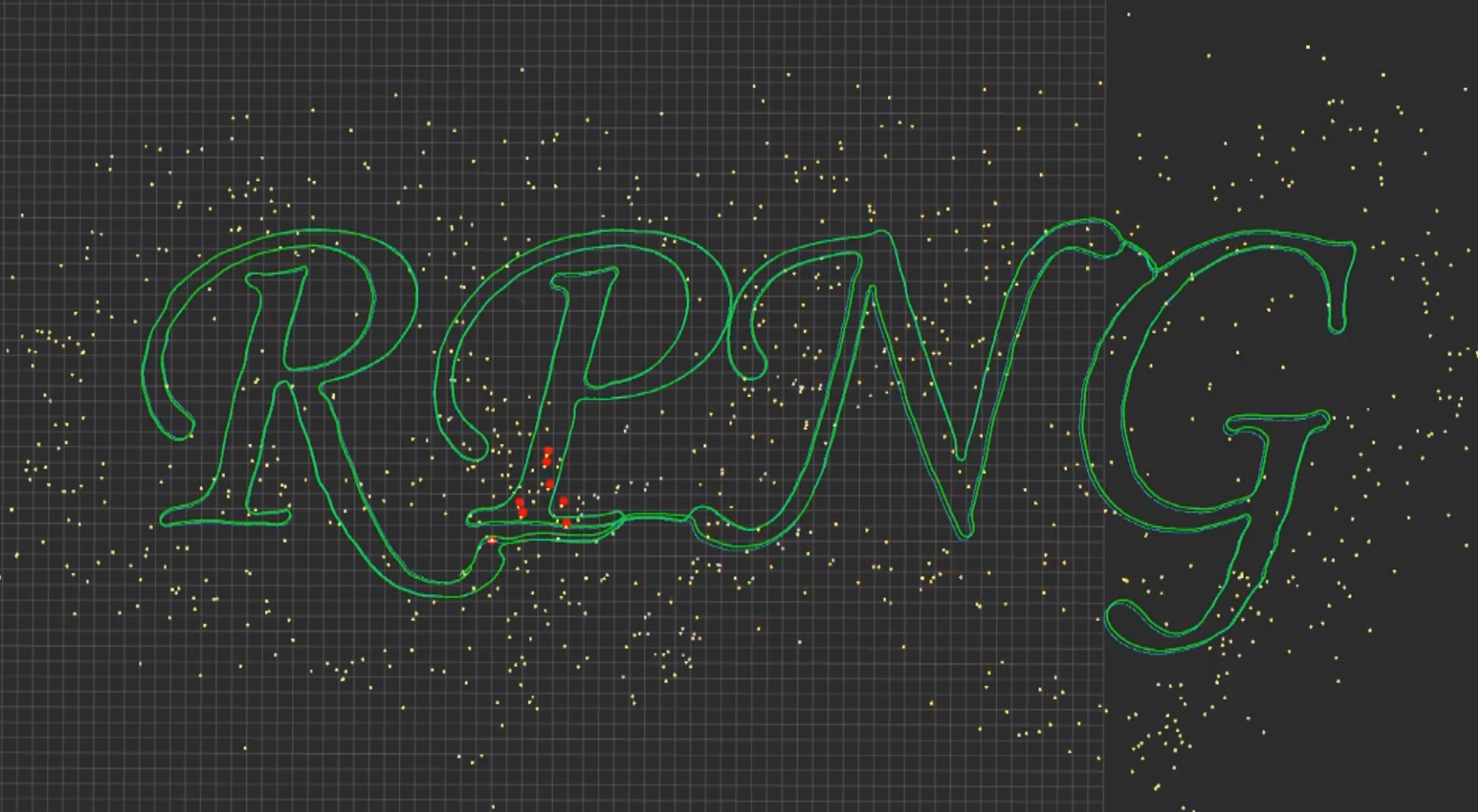
Patrick Geneva, Kevin Eckenhoff, Woosik Lee, Yulin Yang, Guoquan(Paul) Huang IEEE International Conference on Robotics and Automation (ICRA), 2020 bibtex / video / video / video / video / code / doc
A research platform for visual-inertial estimation.
|
|
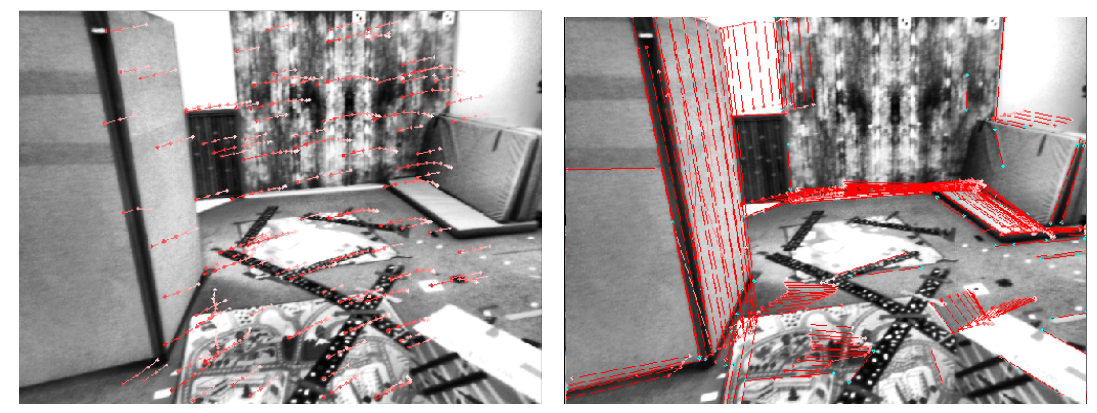
Yulin Yang, Patrick Geneva, Kevin Eckenhoff, Guoquan(Paul) Huang IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2019 bibtex / video
Tightly-coupled VINS with point and line features.
|
|
Xingxing Zuo, Patrick Geneva, Yulin Yang, Wenlong Ye, Yong Liu, Guoquan(Paul) Huang IEEE Robotics and Automation Letters (RAL), 2019 bibtex / video
A tightly-coupled VI system using prior LiDAR map constraints through MSCKF update.
|
|
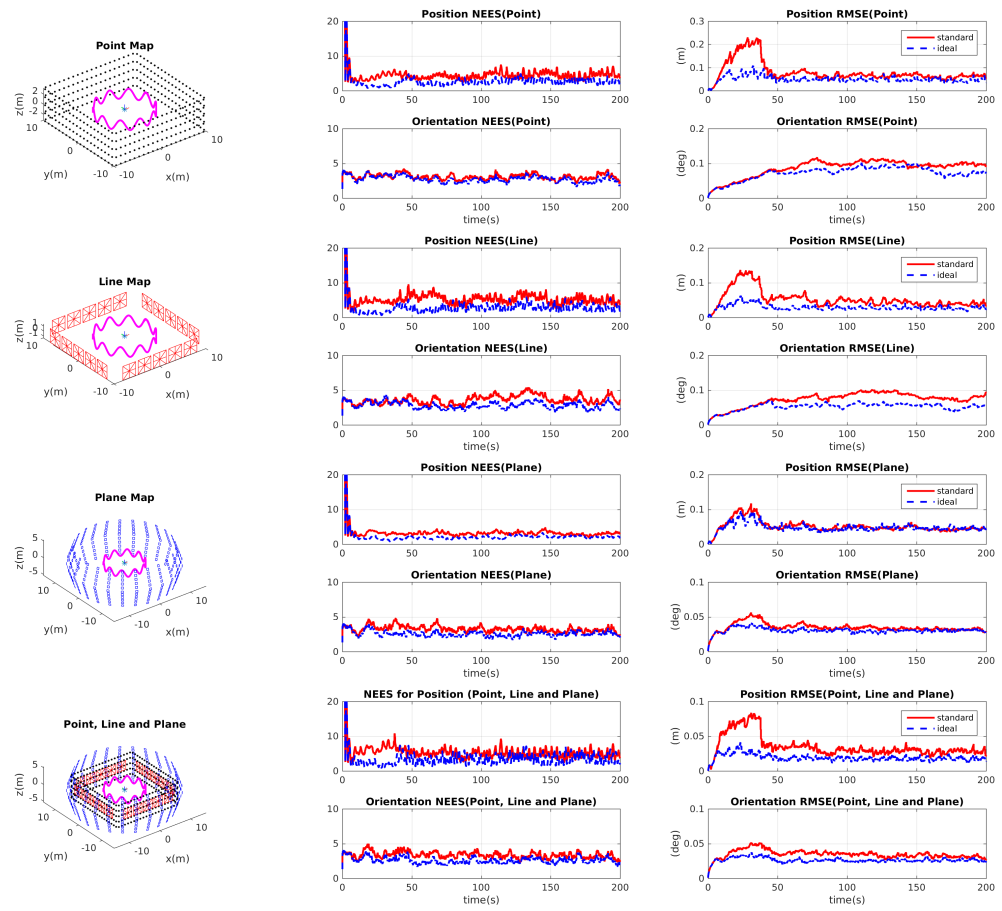
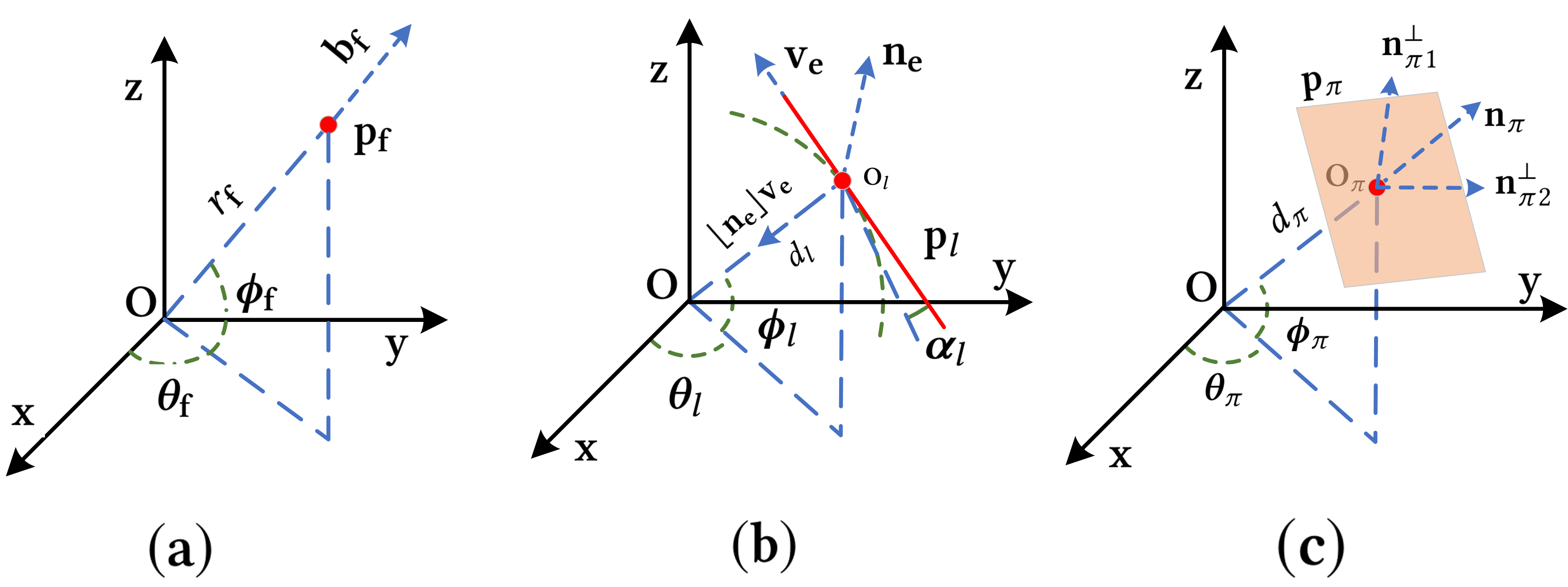
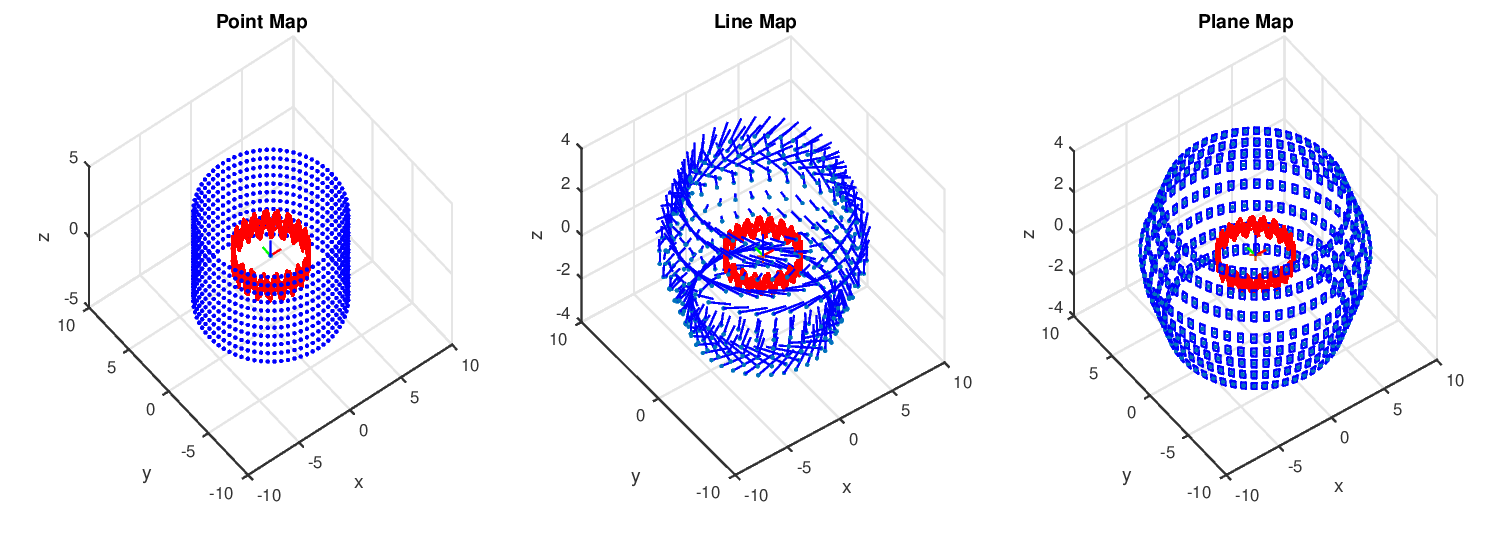
Yulin Yang, Guoquan(Paul) Huang IEEE Transactions on Robotics (TRO), 2019 bibtex
Unified feature representation (CP/Quaternion) for point/line/plane.
|
|
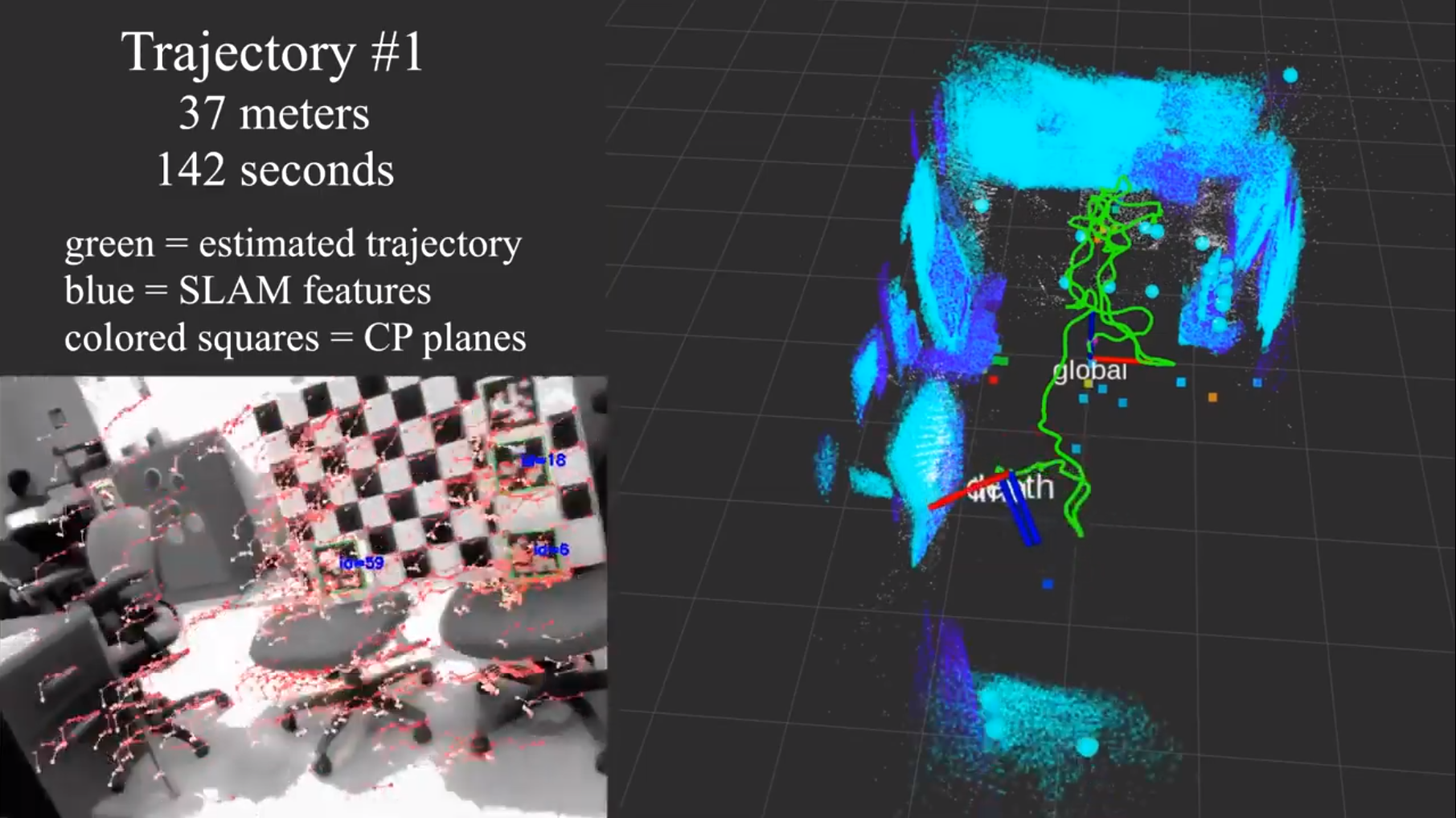
Yulin Yang, Patrick Geneva, Xingxing Zuo, Kevin Eckenhoff, Yong Liu, Guoquan(Paul) Huang IEEE International Conference on Robotics and Automation (ICRA), 2019 bibtex / video
Tightly-coupled visual-inertial system with point and plane features.
|
|
Yulin Yang, Guoquan(Paul) Huang International Conference on Robotics and Automation (ICRA), 2019 bibtex
Unified feature representation (CP/Quaternion) for point/line/plane.
|
|
Yulin Yang, Patrick Geneva, Kevin Eckenhoff, Guoquan(Paul) Huang IEEE Robotics and Automation Letters (RAL), 2019 bibtex / video
Observability analysis for VINS with spatial-temporal calibration.
|
|
Kevin Eckenhoff, Yulin Yang, Patrick Geneva, Guoquan(Paul) Huang IEEE Robotics and Automation Letters (RAL), 2019 bibtex / video Tightly-coupled visual-inertial target tracking.
|
|
Patrick Geneva, Kevin Eckenhoff, Yulin Yang, Guoquan(Paul) Huang IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2018 bibtex / video / code Closest Point (CP) representation for 3D plane.
|
|
Yulin Yang, Guoquan(Paul) Huang IEEE International Conference on Robotics and Automation (ICRA), 2018 bibtex / video / video / video Observability analysis for aided INS with point/line/plane.
|
|
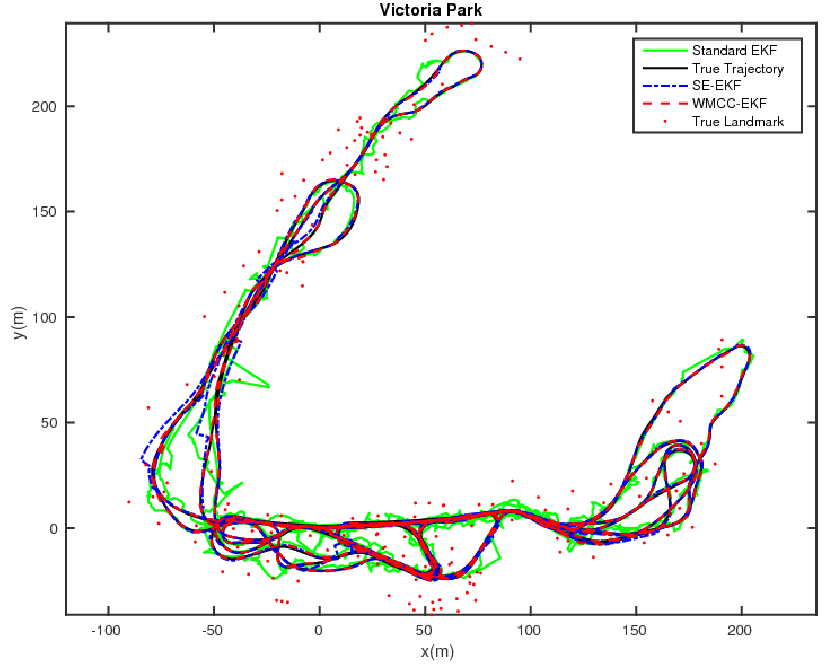
Yulin Yang, Guoquan(Paul) Huang The 18th International Symposium on Robotics Research (ISRR), 2017 Springer Proceedings in Advanced Robotics, 2020 bibtex / video Yulin Yang, Guoquan(Paul) Huang Workshop of Adversarial Robotics at RSS 2018 website Weighted maximum correntropy criterion (MCC)-based EKF.
|
|
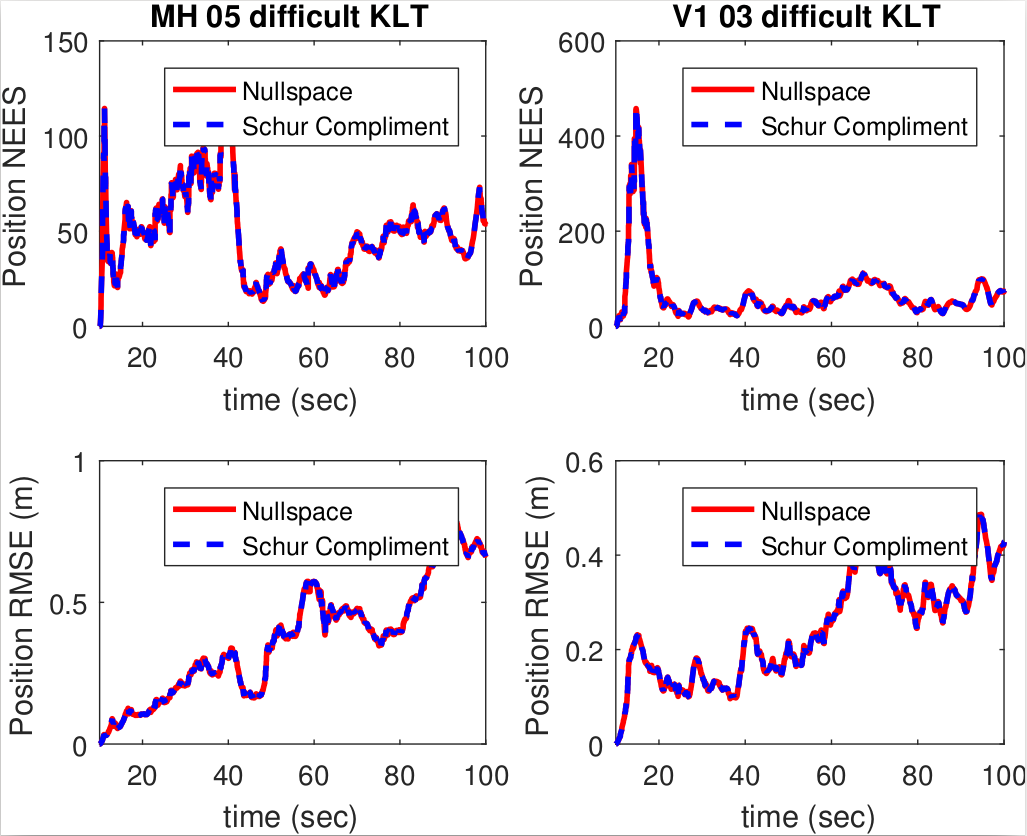
Yulin Yang, James Maley, Guoquan(Paul) Huang IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2017 bibtex Null-space is equivalent to Schur complement with i.i.d. noise.
|
|
Yulin Yang, Guoquan(Paul) Huang IEEE International Conference on Robotics and Automation (ICRA), 2017 bibtex 2D imaging sonar + IMU for underwater navigation.
|
|
Special thanks to Jon Barron for the website's source code. Feel free to use as well as contribute to it. |
|
|